触覚フィードバック手術環境 市場規模と展望、2025-2033年

※本ページの内容は、英文レポートの概要および目次を日本語に自動翻訳したものです。最終レポートの内容と異なる場合があります。英文レポートの詳細および購入方法につきましては、お問い合わせください。
*** 本調査レポートに関するお問い合わせ ***
## 触覚フィードバック手術環境市場の包括的分析
### 1. 市場概要と定義
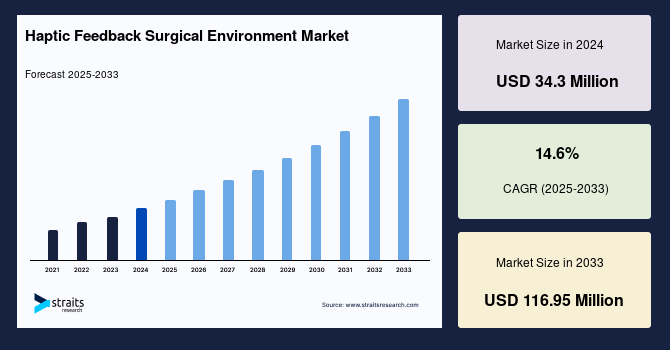
世界の**触覚フィードバック手術環境**市場は、2024年に3,430万米ドルの規模を記録し、2025年には3,931万米ドルに達し、2033年までには1億1,695万米ドルへと成長すると予測されています。予測期間(2025年~2033年)における年平均成長率(CAGR)は14.6%と見込まれており、この市場が急速な拡大期にあることを示しています。
「触覚(Haptic)」という言葉は、ギリシャ語の「haptikos」に由来し、「触覚」や「物体に触れた際に人間が感じる感覚」を意味します。技術的な定義においては、触覚技術とは、コンピューターツールとの相互作用を通じて、力、動き、または振動の形でフィードバックを提供することで、触覚を再現する技術を指します。この技術は、コンピューターがシミュレーションする状況において、ユーザー体験を大幅に向上させることを可能にします。
**触覚フィードバック手術環境**を構成する触覚技術は、機械部分と人間部分の組み合わせによって成り立っています。機械技術の主要な構成要素としては、コンピューター、センサー、リアルタイムアルゴリズム、アクチュエーター、エンドエフェクター、およびアプリケーションプログラミングインターフェース(API)が含まれます。このシステムにおいて、コンピューターは全体のシステムを操作し、エンドエフェクターを通じて人間部分に適切なコマンドを送信する「脳」として機能します。
医療分野における触覚技術の応用は、過去5~6年間で著しい成長を遂げており、自動車、輸送、消費者向け製品、商業・産業分野など、他の多様な最終用途分野においてもその採用が拡大しています。この技術は、従来のシステムでは得られなかった多くの付加的な利点を提供します。
医療訓練において触覚技術を用いる場合、仮想現実(VR)シミュレーターに触覚フィードバック信号が統合されます。これにより、ユーザーは触覚(触覚感覚)、聴覚、視覚の感覚を同時に体験でき、訓練の質や外科手術のパフォーマンス、精度を大幅に向上させることが可能になります。また、触覚対応デバイスは、臨床目的で必要とされるスキルセットの評価にも役立ちます。
外科手術器具に触覚技術が統合されることで、外科医は従来の器具を使用する場合と比較して、患者の体内の組織構造に深くアクセスし、より詳細な感覚を得られるようになります。さらに、触覚技術は手術中に抵抗や弛緩をシミュレートすることで、より優れた触覚感覚体験を提供します。
ロボット支援手術システム(RAS)のロボットアームに触覚技術が統合されると、それは外科医の「外部の肢」として機能します。ロボットアームが組織構造に与えられる器具の力を感知し、その反応を触覚フィードバック信号の形で外科医に提供することで、より直感的で安全な手術が可能になります。技術の進歩に伴い、人工的な触覚フィードバックメカニズムの導入は、将来的には術中診断ツールとしても検討されるようになり、診断手順の精度を飛躍的に向上させることが期待されています。
### 2. 市場を牽引する主要因
**触覚フィードバック手術環境**市場の成長を促進する要因は多岐にわたります。
まず、スタートアップ企業の増加と、研究機関や学術機関の研究成果が商業企業へと転換(スピンオフ)される動きが活発化していることが挙げられます。これらの新しい企業は、革新的な触覚技術ソリューションを市場に投入し、競争を促進するとともに、技術の普及に貢献しています。
次に、触覚技術が自動車、輸送、消費者向け、商業、産業、そして特に医療といった多岐にわたる最終用途分野で採用され、その利点が広く認識されている点です。医療分野では、触覚フィードバックが提供する強化された感覚体験が、外科医の技術向上と患者の安全確保に不可欠であると見なされています。
触覚技術の進歩を支える研究開発活動も重要な推進力です。特に、触覚技術に使用される材料の改良に向けた研究が活発に行われています。目標は、繊細かつ柔軟で、わずかな触覚力信号を容易に感知し、仮想環境で同様のフィードバックをユーザーに提供できる、堅牢な材料を開発することです。これにより、従来の環境でタスクを実行する場合と比較して、ユーザーのパフォーマンスが向上する可能性があります。
さらに、導電性ポリマー、液体金属、イオン導体、カーボンナノチューブ、グラフェン、金属ナノワイヤー、金属ナノ粒子といった新しい素材から、ソフトで伸縮性のある触覚センサーが開発されています。これらの革新的な素材は、精密かつ正確な触覚フィードバック信号と双方向の触覚相互作用を提供する触覚感知デバイスの実現を可能にし、物体や周囲環境から正確な触覚情報を収集する能力を高めます。また、触覚および力フィードバック信号を提供するためのアクティブ材料と作動メカニズムの開発も進んでおり、これらは市場の成長をさらに加速させています。
医療教育の分野では、患者安全への重視が高まっており、徒弟制度や手術室での訓練への依存を軽減する必要性が認識されています。外科的エラーの負担に対処するため、従来の徒弟制度から能力ベースのモデルへと外科教育が劇的に転換しています。医療シミュレーションシステムは、外科教育の実践に革命をもたらす計り知れない可能性を秘めた革新的な技術の一つです。計算技術の最近の進歩は、人体に関する膨大な知識の蓄積と相まって、VRシミュレーションシステムのような破壊的技術を現実のものとしました。VRシミュレーション訓練が精神運動スキルを大幅に向上させることが臨床的に証明されており、外科医の技術習得に極めて有効であることが示されています。外科的スキルを強化するだけでなく、VRシミュレーターは訓練生に標準化された安全な訓練環境を提供し、手術室での訓練に伴う患者安全のリスクを軽減します。これらの要因が相まって、**触覚フィードバック手術環境**市場の持続的な成長を強力に後押ししています。
### 3. 市場の抑制要因と課題
**触覚フィードバック手術環境**市場は著しい成長を遂げていますが、その普及を妨げるいくつかの抑制要因と課題も存在します。
現在の触覚デバイスは主に力フィードバックメカニズムを採用していますが、将来的には振動触覚フィードバックが医療シミュレーターに統合されることが期待されています。しかし、この振動触覚フィードバックメカニズムの利用には、医療機器市場における特定の制約が伴います。例えば、低侵襲手術用ロボットシステムにおいて、振動触覚フィードバックに用いられる偏心回転質量(ERM)や線形共振アクチュエーター(LRA)は電磁波(EM波)を発生させる可能性があり、これが他の医療機器と干渉する恐れがあります。この問題に対処するためには、発生したEM波を閉じ込めることができるデバイスの設計が必要となり、開発コストや複雑さが増す可能性があります。
また、触覚フィードバックのメカニズムの違いが、手術中のリスク管理に影響を与えることも課題の一つです。現在の力フィードバックシステムでは、ユーザーが望ましくない領域の「端」に到達したときにのみ入力が得られます。これに対し、振動触覚フィードバックが統合されたシミュレーターで訓練を受けた外科医を対象とした研究では、ユーザーが患者の体内の望ましくないゾーンに入った際に、システムが振動の強度を高めてユーザーに警告する機能が示されました。これは、力フィードバックのみの場合と比較して、手術中のリスクを低減する上で大きな利点となります。力フィードバックの限界は、外科医が危険な領域に深く入り込むまで警告が得られない可能性を意味し、手術手順中のリスクを増加させる要因となり得ます。これらの技術的な課題や、フィードバックメカニズムの特性がもたらすリスクの違いは、市場の普及において慎重な検討を要する点です。
### 4. 新たな機会と展望
**触覚フィードバック手術環境**市場には、抑制要因を上回る多くの機会が存在し、将来的な成長を力強く促進すると期待されています。
まず、触覚デバイスが現在主に力フィードバックメカニズムを採用している一方で、今後5年間で振動触覚フィードバックが医療シミュレーターに統合される見込みです。偏心回転質量(ERM)および線形共振アクチュエーター(LRA)がより小型でコスト効率の高い設計で開発されることで、力フィードバックメカニズムと比較して振動触覚フィードバックメカニズムの採用が大幅に増加するでしょう。
医療訓練シミュレーターへの振動触覚フィードバックメカニズムの導入は、計り知れない利点をもたらします。前述の研究が示すように、力フィードバックと振動触覚メカニズムの両方が統合されたシミュレーターで訓練を受けた外科医は、スキルセットの向上に大きく貢献しました。例えば、手術中に患者の体内の望ましくないゾーンに入った場合、システムは振動の強度を高めることでユーザーに早期に警告し、危険を回避する機会を提供します。これは力フィードバックのみの場合よりも早くリスクを認識できるため、手術手順中の安全性が劇的に向上します。
さらに、現在多くのメーカーが触覚フィードバック技術を医療機器に統合するために取り組んでいます。今後5年から7年以内に、複雑な遠隔手術の際にウェアラブル触覚デバイスが医療市場で広く使用される可能性が非常に高いと見られています。ウェアラブル触覚デバイスは、仮想環境におけるユーザーのリアリズムを高め、手術や訓練中のパフォーマンスと精度を向上させることができます。HaptX, Inc.、FundamentalVR、CyberGlove Systems LLCなどの主要メーカーは、力フィードバックと触覚フィードバック技術を統合したウェアラブル触覚デバイスの設計・開発を積極的に進めています。
具体的な例として、FundamentalVRは、イマーシブ技術(XR)、ハプティクス、機械学習に取り組んでいます。同社は、高忠実度の物理的相互作用を提供する独自のソフトウェアモデリングシステムであるHaptic Intelligence Engine(HIE)の特許を保有しており、これは外科医に極めてリアルな触覚体験を提供します。CyberGlove Systems LLCは、力フィードバックと触覚フィードバックメカニズムを統合した複数のウェアラブル触覚デバイスモデルを開発しています。同社の「CyberTouch」(振動触覚フィードバック)や「CyberForce with CyberGrasp」(振動触覚フィードバックと力フィードバック)は、各指と手のひらに振動触覚刺激装置を備え、触覚の強さを変化させるようにプログラムされています。これらのデバイスは、より没入感のある訓練と遠隔手術を可能にし、市場に新たな機会を創出します。
最後に、人工的な触覚フィードバックメカニズムが、将来的に術中診断ツールとして導入されることも大きな機会です。これにより、診断手順の精度が向上し、外科医が手術中にリアルタイムで組織の特性をより詳細に評価できるようになることで、患者ケアの質がさらに高まるでしょう。これらの技術革新と応用分野の拡大は、**触覚フィードバック手術環境**市場の持続的な成長を確実なものにします。
### 5. セグメント分析
世界の**触覚フィードバック手術環境**市場は、地理的地域と用途(製品タイプ)によって詳細に分析されています。
#### 5.1. 地域別分析
市場は、北米、欧州、アジア太平洋(APAC)、およびその他の地域(RoW)に区分されます。
* **北米:**
北米地域は、世界の**触覚フィードバック手術環境**市場において最も高い収益貢献度を誇り、予測期間中には11.5%のCAGRを示すと推定されています。この地域は、最新技術の早期採用者であり、先進的なヘルスケアソリューションを提供する企業の技術ハブとしての地位を確立しています。市場の主要企業が集中しているため、世界の市場シェアのかなりの部分を占めています。また、さまざまなヘルスケア産業分野で外科用ロボットなどの技術導入が進んでいることから、企業にとって潜在的な成長機会を提供しています。高度な医療インフラ、潤沢な研究開発資金、そして技術革新への積極的な姿勢が、北米市場の優位性を支えています。
* **欧州:**
欧州地域は、予測期間中に16.9%という高いCAGRで成長すると予測されており、市場の急速な拡大を牽引する主要な地域の一つです。この地域には、EU5カ国(英国、ドイツ、フランス、イタリア、スペイン)の他、ベルギー、オランダ、スイス、スウェーデン、デンマーク、ノルウェー、チェコ共和国、フィンランド、オーストリア、アイルランド、トルコ、ロシアなどが含まれます。主要な業界プレーヤーと政府間の協力関係は、欧州地域における触覚フィードバックデバイスの開発にとって有益であることが証明されています。ヘルスケア分野に対応する触覚デバイスメーカーの多くが欧州に拠点を置いており、例えばフランスのHaption S.A.、スイスのForce Dimension Technologies SARL、スウェーデンのForsslund Systems ABなどが挙げられます。これらの企業は、革新的な製品開発と市場投入を通じて、地域市場の成長に貢献しています。
* **アジア太平洋 (APAC):**
アジア太平洋地域は、世界で3番目に大きな市場であり、オーストラリア、ニュージーランド、日本、中国、インド、韓国、台湾、タイ、シンガポール、マレーシア、インドネシア、フィリピンなどが含まれます。この地域の医療機器市場はまだ発展途上であるものの、いくつかの重要な要因が市場の成長を強力に推進しています。一人当たり所得の一貫した上昇、広大な人口基盤、そして外科用ロボットおよびシミュレータープラットフォームにおける技術進歩が、この地域における計り知れない成長機会に主に貢献しています。さらに、時間のかかる外科手術に対する広範な需要と、医療従事者向けの高度な訓練モジュールの必要性も、アジア太平洋地域における市場成長の主要因となっています。急速な経済発展と医療インフラの近代化が、触覚フィードバック技術の採用を加速させています。
* **その他の地域 (RoW):**
その他の地域には、ラテンアメリカ、中東、アフリカが含まれます。これらの地域も、医療インフラの改善と技術導入への関心の高まりにより、将来的に成長の可能性を秘めていますが、現状では北米、欧州、アジア太平洋に比べて市場規模は小さいです。
#### 5.2. 用途別分析
グローバル市場は、ロボット手術システムと医療シミュレーターの二つの主要な用途に分けられます。
* **ロボット手術システム:**
ロボット手術システムセグメントは、世界の**触覚フィードバック手術環境**市場を支配しており、予測期間中には14.9%のCAGRで成長すると予測されています。ロボットまたはロボット支援手術は、従来の手法と比較して、より複雑な手術手順を高精度、高制御性、高柔軟性で実施することを可能にします。これらの技術は、多くの場合、低侵襲手術と関連付けられています。外科用ロボット市場は、予測期間中に著しい成長を遂げると予想されており、その主な要因は、慢性疾患の有病率と発生率の増加、世界的な人口増加と高齢化の進展、先進国における有利な償還政策、そして高度なロボット技術開発のための公的イニシアチブと資金提供です。触覚フィードバックの統合により、外科医はロボットアームを介して組織の抵抗や質感をより直感的に感じ取ることができ、手術の安全性と成功率がさらに向上します。
* **医療シミュレーター:**
医療シミュレーターセグメントは、市場で2番目に大きな割合を占めています。患者安全への意識の高まりは、外科訓練における徒弟制度や手術室での実地訓練への依存を軽減する必要性を駆動しています。外科的エラーの負担に対処するためには、従来の徒弟制度から能力ベースのモデルへと外科教育のダイナミックな転換が求められています。医療シミュレーションシステムは、外科教育の実践に革命をもたらす計り知れない可能性を秘めた革新的な技術の一つです。計算技術の最近の進歩は、人体に関する計り知れない知識の蓄積によって補完され、VRシミュレーションシステムのような破壊的技術を現実のものとしました。VRシミュレーション訓練が訓練生の精神運動スキルを大幅に向上させることが臨床的に証明されており、その有効性が広く認識されています。外科的スキルを強化するだけでなく、VRシミュレーターは訓練生に標準化された安全な訓練環境を提供し、手術室での訓練に伴う患者安全のリスクを軽減します。触覚フィードバックは、これらのシミュレーターにリアルな触覚感覚を加えることで、訓練の効果を最大化し、将来の外科医の能力向上に不可欠な役割を果たします。
### 結論
**触覚フィードバック手術環境**市場は、技術革新、医療ニーズの増加、そして患者安全への意識の高まりを背景に、今後も力強い成長を続けることが予測されます。特に、ロボット手術システムと医療シミュレーターの分野における触覚技術の進化は、外科医のスキル向上、手術の精度と安全性の向上、そして最終的には患者ケアの質の向上に大きく貢献するでしょう。新たな素材の開発、ウェアラブルデバイスの普及、そして振動触覚フィードバックの統合といった機会が、この市場の未来をさらに豊かなものにすると期待されます。
Report Coverage & Structure
- 目次
- セグメンテーション
- 調査方法
- 無料サンプルを入手
- 目次
- エグゼクティブサマリー
- 調査範囲とセグメンテーション
- 調査目的
- 制限事項と仮定
- 市場範囲とセグメンテーション
- 考慮される通貨と価格設定
- 市場機会評価
- 新興地域/国
- 新興企業
- 新興アプリケーション/最終用途
- 市場トレンド
- 推進要因
- 市場警戒要因
- 最新のマクロ経済指標
- 地政学的影響
- 技術的要因
- 市場評価
- ポーターの5フォース分析
- バリューチェーン分析
- 規制の枠組み
- 北米
- 欧州
- アジア太平洋
- 中東およびアフリカ
- ラテンアメリカ
- ESGトレンド
- 世界の触覚フィードバック手術環境市場規模分析
- 世界の触覚フィードバック手術環境市場概要
- アプリケーション別
- 概要
- アプリケーション別金額
- 外科用ロボットシステム
- 金額別
- 医療シミュレーター
- 金額別
- 世界の触覚フィードバック手術環境市場概要
- 北米市場分析
- 概要
- アプリケーション別
- 概要
- アプリケーション別金額
- 外科用ロボットシステム
- 金額別
- 医療シミュレーター
- 金額別
- 米国
- アプリケーション別
- 概要
- アプリケーション別金額
- 外科用ロボットシステム
- 金額別
- 医療シミュレーター
- 金額別
- アプリケーション別
- カナダ
- 欧州市場分析
- 概要
- アプリケーション別
- 概要
- アプリケーション別金額
- 外科用ロボットシステム
- 金額別
- 医療シミュレーター
- 金額別
- 英国
- アプリケーション別
- 概要
- アプリケーション別金額
- 外科用ロボットシステム
- 金額別
- 医療シミュレーター
- 金額別
- アプリケーション別
- ドイツ
- フランス
- スペイン
- イタリア
- ロシア
- 北欧
- ベネルクス
- その他の欧州
- アジア太平洋市場分析
- 概要
- アプリケーション別
- 概要
- アプリケーション別金額
- 外科用ロボットシステム
- 金額別
- 医療シミュレーター
- 金額別
- 中国
- アプリケーション別
- 概要
- アプリケーション別金額
- 外科用ロボットシステム
- 金額別
- 医療シミュレーター
- 金額別
- アプリケーション別
- 韓国
- 日本
- インド
- オーストラリア
- 台湾
- 東南アジア
- その他のアジア太平洋
- 中東およびアフリカ市場分析
- 概要
- アプリケーション別
- 概要
- アプリケーション別金額
- 外科用ロボットシステム
- 金額別
- 医療シミュレーター
- 金額別
- アラブ首長国連邦
- アプリケーション別
- 概要
- アプリケーション別金額
- 外科用ロボットシステム
- 金額別
- 医療シミュレーター
- 金額別
- アプリケーション別
- トルコ
- サウジアラビア
- 南アフリカ
- エジプト
- ナイジェリア
- その他の中東およびアフリカ
- ラテンアメリカ市場分析
- 概要
- アプリケーション別
- 概要
- アプリケーション別金額
- 外科用ロボットシステム
- 金額別
- 医療シミュレーター
- 金額別
- ブラジル
- アプリケーション別
- 概要
- アプリケーション別金額
- 外科用ロボットシステム
- 金額別
- 医療シミュレーター
- 金額別
- アプリケーション別
- メキシコ
- アルゼンチン
- チリ
- コロンビア
- その他のラテンアメリカ
- 競合環境
- 触覚フィードバック手術環境市場におけるプレイヤー別シェア
- M&A契約と提携分析
- 市場プレイヤー評価
- Moog, Inc.
- 概要
- 企業情報
- 収益
- 平均販売価格 (ASP)
- SWOT分析
- 最近の動向
- Haption S.A.
- Forsslund Systems AB
- Force Dimension
- 3D Systems Corporation
- OrbSurgical Limited.
- Moog, Inc.
- 調査方法
- 調査データ
- 二次データ
- 主要な二次情報源
- 二次情報源からの主要データ
- 一次データ
- 一次情報源からの主要データ
- 一次情報の内訳
- 二次および一次調査
- 主要な業界インサイト
- 市場規模推定
- ボトムアップアプローチ
- トップダウンアプローチ
- 市場予測
- 調査の仮定
- 仮定
- 制限事項
- リスク評価
- 付録
- 議論ガイド
- カスタマイズオプション
- 関連レポート
- 免責事項
*** 本調査レポートに関するお問い合わせ ***

触覚フィードバック手術環境とは、外科医が手術中に触覚的な感覚を受け取ることができるように設計されたシステムや空間を指します。特に、内視鏡手術やロボット支援手術といった低侵襲手術において、直接的な物理的接触が失われるという課題を克服するために開発されております。この環境は、組織の硬さ、質感、そして手術器具にかかる力の情報を外科医に伝えることで、手術の精度と安全性を大幅に向上させることを目的としています。外科医は、これらの触覚情報を通じて、まるで手で直接触れているかのように詳細な感覚を得ることが可能になります。
従来の開腹手術では、外科医は患部に直接触れることで、臓器や組織の状態を指先の感覚で確かめてきました。しかしながら、近年主流となっている低侵襲手術、特に腹腔鏡手術やダヴィンチなどのロボット支援手術では、術野がモニターを介してしか見えず、器具も長いシャフトを通じて操作されるため、この直接的な触覚情報がほとんど失われます。これにより、外科医は組織に過度な力を加えてしまったり、逆に十分な力をかけられなかったりするリスクを抱えることになります。この触覚の欠如は、深さの知覚の困難さや動作範囲の制限と相まって、手術の難易度を高める主要な要因の一つとされております。
触覚フィードバックの提供方法にはいくつかの種類がございます。最も一般的なものは「力覚フィードバック」であり、これは外科医の手や器具に抵抗や圧力を加えることで、組織の硬さや接触による反発力をシミュレートするものです。例えば、硬い腫瘍に触れた際には強い抵抗が、柔らかい組織には弱い抵抗が返されるように設計されています。また、「触覚フィードバック」は、表面の質感、振動、または微細な圧力の変化を再現することに焦点を当てており、振動アクチュエーターや微小な圧力アレイを用いて実現されます。さらに、器具の関節角度や位置に関する情報を提供する「固有受容感覚フィードバック」も研究されており、これらを組み合わせることで、より包括的かつリアルな触覚体験を提供することが目指されています。
触覚フィードバック手術環境は多岐にわたる用途で活用されております。まず、ロボット支援手術において、外科医が遠隔操作でロボットアームを動かす際に、患者の体内で発生している力をリアルタイムで感じ取ることが可能になります。これにより、より繊細な操作や正確な組織の剥離が可能となります。次に、外科手術のトレーニングやシミュレーション分野では、学生や若手外科医が患者にリスクを与えることなく、様々な手術手技を触覚を伴って習得するための非常に有効なツールとして機能します。例えば、縫合の際の糸の張力や組織の切開時の抵抗などを実感しながら練習できます。遠隔手術(テレポート手術)においても、外科医が地理的に離れた場所から手術を行う際に、患者の体内の感覚を共有できるため、その可能性を大きく広げるものとして期待されております。
この高度な手術環境を構築するためには、様々な関連技術が統合されています。まず、手術器具の先端やロボットアームの関節部には、微細な力やトルク、位置を検出する高精度なセンサーが組み込まれております。これらのセンサーが収集したデータは、複雑な制御アルゴリズムによってリアルタイムで解析されます。そして、その解析結果に基づき、外科医が握るマスターコントローラーや専用のデバイスに、電気機械式アクチュエーター、空気圧システム、またはピエゾ素子などのフィードバック生成装置を介して触覚情報が伝達されます。また、仮想現実(VR)や拡張現実(AR)技術との融合により、視覚情報と触覚情報がシームレスに統合され、より没入感のある手術空間が創出されております。加えて、人工知能(AI)や機械学習は、組織の特性を予測したり、外科医の操作を学習して最適なフィードバックを提供したりする役割も担い始めています。
触覚フィードバック手術環境の導入は、手術の精度向上、組織損傷のリスク低減、そして患者様の安全性向上に大きく貢献します。外科医はより自信を持って手術に臨むことができ、特に微細な構造を扱う脳神経外科や眼科、心臓外科などの分野でその恩恵は大きいと考えられます。将来的には、より高忠実度でリアルな触覚再現、フィードバックデバイスの小型化とウェアラブル化、そしてAIによる予測的フィードバックのさらなる進化が期待されております。これらの技術革新は、外科手術の新たな地平を切り開き、最終的には患者様の治療成績の向上へと繋がるものと確信しております。