SLAM技術市場規模と展望、2022-2030

※本ページの内容は、英文レポートの概要および目次を日本語に自動翻訳したものです。最終レポートの内容と異なる場合があります。英文レポートの詳細および購入方法につきましては、お問い合わせください。
*** 本調査レポートに関するお問い合わせ ***
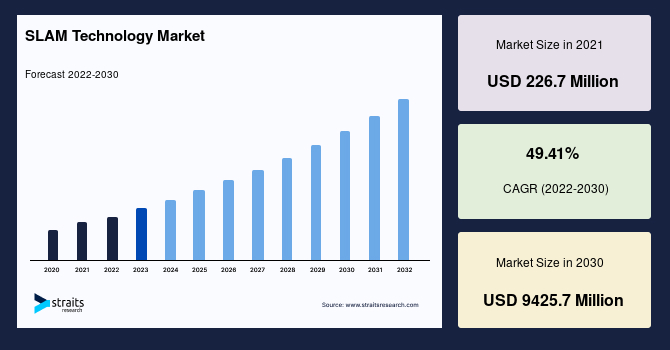
グローバルなSLAM技術市場は、2021年に2億2670万米ドルと評価されました。2022年から2030年の予測期間中に年平均成長率(CAGR)49.41%で成長し、2030年までに94億2570万米ドルに達すると予想されています。SLAM技術は、コンピュータビジョンシステムで使用される技術であり、多様な内蔵センサーを使用して外界から視覚情報を収集します。このデータを別の形式に変換することで、SLAM技術は機械がそれを視覚的手がかりとして理解しやすくなります。SLAM技術の開発以前は、屋内のデバイスが自身の位置を特定し、作業環境の地図を理解することは困難でした。この問題は、位置特定には周囲の地図が必要であり、地図作成には位置特定が必要であるため、「鶏と卵」の問題と呼ばれていました。SLAM技術は、位置特定と地図作成の問題を同時に解決し、この鶏と卵の問題に対する解決策を提供します。
拡張現実(AR)において、SLAM技術は画期的な革新として位置づけられています。SLAM技術の多くの利点、例えばより高い精度と効率の向上により、マーカー型技術を徐々に置き換えています。マーカー型技術では、拡張現実を体験するために定義された画像をデバイスのカメラの前に置く必要がありますが、SLAMベースのARではセンサーを使用して現実世界の環境を正確に検出するため、この問題が解決されました。その結果、AR企業はSLAM技術を導入しており、予測期間中の需要の成長に貢献すると予想されています。
家庭用サービスロボットの需要増加
サービスロボット市場は、物流・倉庫、防衛・セキュリティ、農業、広報、ヘルスケア、エンターテイメント、家庭など様々な産業でのロボット需要の増加により加速しています。さらに、これらのロボットの市場での発展を促進する主要な要素の一つは、消費者の認識レベルの向上です。サービスロボットの需要のかなりの部分は、家庭環境で使用されるロボットで構成されています。家庭および家庭用ロボットに自律機能を組み込むことは非常に困難です。家庭の混沌とした環境のため、手続きはますます複雑になっています。この意味で、ロボットが自分の位置を特定し、周囲を地図化する能力はSLAM技術によって可能になります。より良い自律運転のために、複数の家庭用ロボットメーカーが現在SLAM技術を使用しています。例えば、iRobot Corporationが製造するRoomba清掃ロボットは、家の地図を作成し、効率的に清掃しながら自律的に動作するためにSLAM技術を使用しています。
プレイヤーが直面する最も重要な課題の一つは、SLAM技術を適用する際の技術的な複雑さです。SLAM技術の適用は、ロボティクス、UAV、自己運転車、拡張現実のいずれにおいても多様な複雑な課題を提示します。ロボティクスにおけるぼやけ効果やループクローザの検出の難しさは、最も重要な技術的課題の一部です。さらに、この技術はまだ開発とテストの初期段階にあり、困難な点はまだ徹底的に調査されていません。高額な投資は、SLAM技術の広範な採用に対する大きな障害です。そのため、中小企業がSLAM技術を採用するのは困難です(SMEロボット)。UAVアプリケーションにおけるSLAM技術に関連する追加コストは、SLAM技術ベースのUAVを購入することをためらわせます。したがって、SLAM技術市場の拡大に対する主な障害は、技術的な複雑さと高いセットアップコストです。
最近、センサー、プロセッサ、AI、機械学習はUAV技術を改善しました。UAV技術の開発者は、BVLOS(Beyond Visual Line of Sight)障害物検出時に迅速に行動するAIベースの衝突回避システムを設計しています。Iris Automationは、AIベースの衝突回避技術を7000回以上の飛行でテストしました。ドローンへのAI搭載のセンスアンドアボイドシステムの統合は、自動化とBVLOSの範囲を拡大します。現在、商業的なエンドユーザーはBVLOSでドローンを操作することが制限されていますが、これらの制約は緩和され、今後5年間でBVLOSドローン市場が爆発的に増加することが予想されています。このようなドローン操作のために環境を検出するSLAM技術は、市場成長を促進すると予測されています。
自己運転車と自律車両は、未来のモビリティとして見られています。これらの車両は、直近の環境を感知し、最小限の助けで動くことを基本としています。テスラ、グーグル、ウーバー、メルセデス・ベンツ、ゼネラルモーターズ、コンチネンタルオートモーティブシステムズ、オートリブ、ボッシュ、日産、トヨタ、アウディ、ボルボを含む多くの大手自動車会社が、自律車両の開発を追求しています。グーグルのウェイモ自己運転車プログラムは、独立した移動のためにSLAM技術を利用しています。この技術は、LiDARやその他のセンサーからのデータを使用して、車の移動中に周囲の地図を作成します。自己運転車に使用されるSLAM技術は、自律性を高め、エラーの可能性を低下させ、精度と全体的なパフォーマンスを向上させます。したがって、予測期間中、グローバルなSLAM技術市場の機会は増大します。
ヨーロッパがグローバル市場を支配
地域別では、グローバルなSLAM技術市場は北米、ヨーロッパ、アジア太平洋、その他の世界に分けられます。ヨーロッパは、グローバルなSLAM技術市場の最大のシェアを持ち、予測期間中に48.96%のCAGRで成長すると予測されています。ヨーロッパの主要国の一つであるドイツは、SLAM技術の様々な用途に対する進展に多額の投資をしています。ドイツでは、ロボットや無人航空機(UAV)がSLAMアプリケーションの可能性に関して盛んに研究されています。ドイツは現在、ヨーロッパ全体でSLAM技術の最大シェアを持っており、2030年までにその支配を維持すると予測されています。北米は47.62%のCAGRで成長し、予測期間中に27億2740万ドルを生み出すと予測されています。市場シェアに関しては、北米は現在、SLAM技術セクターで2番目にランクされています。北米には多くのロボティクス、ドローン、拡張現実の企業が存在しており、既存の企業も成長しています。北米では、SLAM技術が様々な産業、家庭用、商業用、軍事用、物流用アプリケーションに適用されています。多くの産業にわたる産業用および物流用ロボットの需要は、地域の商業エンドユーザー間でのSLAM技術需要の主な推進力の一つです。
アジア太平洋(APAC)は、世界で最も有望な市場の一つです。アジア太平洋地域では、産業オートメーションへの資本支出が積極的に増加しています。中国、日本、インド、韓国が、アジア太平洋地域のロボティクス産業の成長に貢献しています。商業および非商業用途の両方で、SLAMベースのロボット、UAV、および拡張現実プラットフォームの需要が増加するにつれて、この分野の新しい参加者にとって多数の機会が存在します。さらに、アジア太平洋地域のいくつかの国では、SLAMベースの自律車両技術の活発な研究が行われています。アジア太平洋地域でのSLAM技術の発展を推進する主な要因の一つは、APAC地域の国々の間での、自律ロボットおよびドローンの商業利用の増加です。
中東およびアフリカ(MEA)とラテンアメリカは、SLAM技術にとって最も重要な地域です。中東は、アラブ首長国連邦、サウジアラビア、クウェート、イラン、トルコ、イスラエルを含むいくつかの国で構成されています。中東諸国は、急速に進化するグローバルなロボティクス市場に対応するために、ロボティクス産業の継続的な開発に積極的に関与しています。国々は、オートメーションおよびロボティクス能力を向上させるために、アジア太平洋諸国と協力しています。
グローバルなSLAM技術市場は、マッピング、タイプ、プラットフォーム、およびエンドユーザーによってセグメント化されています。マッピングに基づいて、グローバルなSLAM技術市場は2D SLAMと3D SLAMに二分されています。2D SLAMセグメントは市場への最大の貢献者であり、予測期間中に46.79%のCAGRで成長すると予測されています。2D SLAMのほとんどのハードウェアコンポーネントは、マッピング、位置特定、およびモーションプランニングのために2Dセンサーを使用します。2D SLAM法はレーザースキャナーに基づいています。これらのシステムはフレームを取り込み、2Dの測定とデータポイントを抽出し、2Dマップを作成します。2D平面で移動するロボットおよび自律車両にとって、2D SLAMは十分です。3D SLAMと比較して、2D SLAMは実装が簡単で、複雑さが少ないです。3次元での同時位置特定とマッピングは3D SLAMと呼ばれます。これらのシステムは、ロボットシステムが3次元でナビゲートすることを可能にします。高レベルのロボットシステム、ドローン、および拡張現実アプリケーションが3D SLAMソリューションの主なユーザーです。これらのソリューションは、2D SLAMと比較して計算的により複雑です。
タイプに基づいて、グローバルなSLAM技術市場は拡張カルマンフィルター(EKF)、グラフベースのSLAM、および高速SLAMに二分されています。カルマンフィルターセグメントは市場への最大の貢献者であり、予測期間中に46.41%のCAGRで成長すると予測されています。拡張カルマンフィルター(EKF)SLAMは、オンラインSLAM問題に対する提案されたソリューションの一つです。オンラインSLAM問題では、ロボットの現在の位置が、完全な軌道を考慮せずに推定されます。この方法では、ロボットに搭載されたセンサーを使用してランドマークを特定します。計算システムがリアルタイムで多数のランドマークをマッピングできないため、長時間のミッションには不向きと考えられています。ロボティックマッピングおよび自律車両は、20年以上使用されてきたEKF SLAMの例であり、今もなお使用されています。グラフベースのSLAMでは、ロボットの位置とランドマークはノードによって表され、エッジは位置間の制約を示します。このようなグラフの作成後、ノードの空間配置を調査することによって地図の計算が開始されます。グラフを最適化する最初のステップは、ノード情報を修正して新しい地図を形成することです。
プラットフォームに基づいて、グローバルなSLAM技術市場はロボット、UAV、拡張現実、および自律車両に二分されています。ロボットセグメントは最大の市場シェアを持ち、予測期間中に35.50%のCAGRで成長すると予測されています。SLAM技術を使用するロボットは、自律的に移動することができます。SLAM技術のおかげで、ロボットは同時に周囲の情報を収集し、自分の位置を追跡し、リアルタイムで周囲のライブマップを作成することができます。産業用、清掃用、およびセキュリティ用に使用されるロボットは、主にSLAM技術を採用しています。ロボティクス業界はSLAM技術にとって大きな可能性を秘めており、多くの用途があります。これらの可能性は、多くのロボティクス企業が技術の進歩に向けて協力するよう促しました。したがって、ロボティクスのためのSLAM技術は、将来に前例のない選択肢を提供します。
無人航空機(UAV)は、配送、監視、検査を含む様々なタスクのための自律または部分的に自律的なプラットフォームです。UAVは周囲を地図化するためにSLAM技術を使用します。UAVには、周囲を同時に地図化および位置特定するための追加のSLAMモジュールがあります。UAVにおけるSLAM技術の市場は、世界で2番目に高いシェアを持っています。
Report Coverage & Structure
レポート構造の概要
このレポートは、SLAM技術市場の包括的な分析を提供しており、その構造は以下の主要なセクションで構成されています。
導入部
- エグゼクティブサマリー: レポートの重要な要点や結論をまとめた概要。
- 調査の範囲とセグメンテーション: 調査の目的、制限、仮定、対象とする市場の範囲とセグメンテーション、通貨および価格設定に関する情報。
市場機会評価
- 新興地域/国: SLAM技術の成長が予測される地域や国に関する分析。
- 新興企業: 業界内で注目される新しい企業の紹介。
- 新興アプリケーション/エンドユース: SLAM技術の新しい応用分野や用途の探索。
市場動向
- ドライバー: 市場成長を促進する要因。
- 市場警告要因: 市場に影響を与える可能性のあるリスク要因。
- 最新のマクロ経済指標: 経済状況の変化が市場に与える影響。
- 地政学的影響: 地政学的要因が市場に与える影響。
- 技術要因: 技術革新や進展が市場に及ぼす影響。
市場評価
- ポーターの5つの力分析: 業界の競争力を評価するためのフレームワーク。
- バリューチェーン分析: 製品やサービスが市場に届くまでのプロセスの分析。
規制の枠組み
- 地域別分析: 北米、ヨーロッパ、APAC、中東とアフリカ、LATAMにおける規制環境の分析。
ESGトレンド
環境、社会、ガバナンスに関連するトレンドの分析。
グローバルSLAM技術市場規模分析
- 市場導入: マッピング、タイプ、プラットフォーム、エンドユーザーごとの市場の詳細な分析。
- タイプ別分析: EKF、グラフベースSLAM、ファストSLAMなどのタイプごとの市場評価。
- プラットフォーム別分析: ロボット、UAV、拡張現実、自動運転車などのプラットフォームごとに分析。
- エンドユーザー別分析: 製造および物流、商業、家庭、軍事などのエンドユーザーごとの市場評価。
地域別市場分析
SLAM技術市場の地域別詳細分析が含まれています。
- 北米市場分析: 米国とカナダに焦点を当てた市場の詳細な分析。
- ヨーロッパ市場分析: イギリス、ドイツ、フランス、スペイン、イタリア、ロシア、ノルディック、ベネルクス、その他のヨーロッパ地域の分析。
- APAC市場分析: 中国を中心としたアジア太平洋地域の市場分析。
*** 本調査レポートに関するお問い合わせ ***

SLAM技術とは、Simultaneous Localization and Mapping(同時位置推定と地図作成)の略で、移動するロボットや自動運転車などが自らの位置を特定しつつ、周囲の環境を地図として構築するための技術です。この技術は、位置推定と地図作成を同時に行うことが求められるため、非常に高度な計算処理を必要とします。SLAM技術は、カメラやレーザーセンサー、IMU(慣性計測装置)などを用いて、周囲の環境を精密に測定し、その情報を基に自己位置を特定することで、動的な環境下でも安定したナビゲーションを実現します。
SLAM技術にはいくつかの種類があります。代表的なものには、視覚的SLAM(Visual SLAM)とレーザーSLAMがあります。視覚的SLAMは、カメラを用いて環境を撮影し、その画像情報から特徴点を抽出して位置を特定します。一方、レーザーSLAMは、レーザーセンサーを使用して高精度な距離情報を取得し、これを基に地図を作成します。さらに、最近では、これらを組み合わせたマルチセンサSLAMも注目されています。これは、複数のセンサーから得られる情報を統合し、より精度の高い位置推定と地図作成を可能にする方法です。
SLAM技術の応用分野は多岐にわたります。最も一般的な例としては、自律移動ロボットやドローンのナビゲーションがあります。これらの機器は、SLAM技術を利用して障害物を避けたり、目的地までの最短経路を決定したりします。また、最近では、自動運転車にもSLAM技術が組み込まれており、道路状況のリアルタイムな把握と自己位置の正確な特定に活用されています。さらに、建物の内部マッピングやバーチャルリアリティ(VR)の環境構築にも利用されており、SLAM技術はさまざまな分野でその重要性を増しています。
SLAM技術に関連する技術として、オドメトリやフィルタリング技術があります。オドメトリは、車両の移動距離や方向を推定するための技術で、SLAMにおける位置推定を補完します。また、カルマンフィルタやパーティクルフィルタといったフィルタリング技術は、センサーからのノイズを除去し、より正確な位置推定を可能にします。これらの技術は、SLAMシステムの精度と信頼性を高めるために欠かせない要素です。
SLAM技術は、今後もさらなる発展が期待される分野です。特に、人工知能や機械学習との融合によって、より高度な環境理解や自律的な意思決定が可能となるでしょう。このように、SLAM技術は、未来の移動手段や新しい技術の基盤として、ますます重要な役割を果たしていくことが予想されます。